分布式系统中的时间(二)——时序的确定
在前一篇文章中,我们谈到了分布式系统里进程彼此的物理时间是如何进行同步的,并介绍了一些经典的时间同步算法。但静下心来仔细想想,我们希望进行时间同步,很多时候是希望不同的进程,对系统内事件的顺序达成一致。至于是否是使用真实世界的那个时间来排序,往往并不是那么重要。
那么,如何在一个分布式系统中,对发生在众多节点上的事件进行定序呢?目前已知的做法包括以下几种:
- 使用物理时间同步的方法,确保众多节点的时间偏差在某个范围内(参考前一篇文章)。而后记录事件的发生时间及理论误差范围,比如将每个事件的发生时间登记为\((t \pm \Delta)\), 如果两个事件的时间范围没有overlap,那么就自然的可以排序判断;否则,则需要引入一个新的排序规则(比如以节点id),对这两个事件约定一个排序。spanner中采用了这种方式。
- 采用Lamport Timestamp及其引申算法进行定序,确保事件满足causality consistency的性质,成为后续更高层次的分布式算法设计的基础。本文后面主要将展开这类算法,并引出分布式系统中一些基础概念。这些基础概念是理解分布式共识问题(consensus problem)的基础。
为明确这个问题,我们首先需要先对事件的序(happen-before)做出一个定义。在Lamport的体系中,事件的先后关系是按照如下原则设定的:
- 规则一:如果A、B两个事件都发生在同一个进程内,那么,A、B之间的序自然可以由这个进程给出。假如进程先执行了A后执行了B,那么可以说A在B之前发生,记为\(A \prec B\);
- 规则二:如果进程x往进程y发送了一条消息M;设在进程x的消息发送事件为A,进程y收到消息的事件为B,则显然我们应当认为A在B之前发生,同样记为\(A \prec B\)。
这两个规则是非常自然的,因为它体现了事物的“因果关系”(causality)。比如,张三买了张电影票后(事件A),走进了电影院(事件B); 在路边李四的眼里,也应该是按照这个顺序进行的(规则一),否则会让人以为张三无票进场了。但假如还有个王五,也先买票(事件C)后进电影院(事件D)。那么,从观察者的角度来看,只需要保证\(A \prec B\)和\(C \prec D\)即可。AB和CD是并发的两组独立事件,无论是怎么相互传插着到达第三者眼中的,这个第三者都不会觉察出有什么异样;但如果王五不是从售票窗口买的电影票,而是从张三那里买的,即二者之间发生了通讯、交换了信息,那我们就必需要满足\(A \prec C\)和\(C \prec D\),否则旁观者就会觉察出王五凭空从口袋里变出了一张电影票,是”不合逻辑”的。我们希望设计一种算法,能够对一个分布式系统间的所有事件打上一个逻辑上的时间戳(timestamp),使其排序结果不违背上面的两个规则,以符合人对事件因果关系的理解。
由此引出了Lamport timestamp的算法,这个算法就是一种给事件打上逻辑时间戳、确保其满足causality的基本属性。这个算法的基本过程为:
- 每个进程都记录自己的一个当前时间戳,初始的时候,大家都是0
- 如果进程内部发生了一个新的事件,那么将当前时间戳记为\(t'=t+1\),并认为事件发生于\(t'\)时刻
- 如果进程A向进程B通讯,则发送消息的时候,进程A的时间戳\(t'_A = t_A + 1\),并随消息发送到B,B更新自己的时间戳为\(t'_B = max(t'_B, t'_A) + 1\)
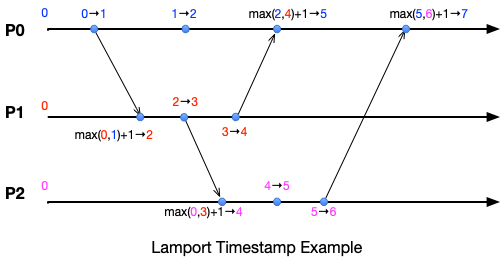
// TODO: 补充一个图,说明lamport的计算过程
至此,系统中事件都被打上了时间戳,彼此满足Causality的属性。我们可以据此比较系统中的两个事件发生的先后顺序。如果\(A \prec B\)和\(B \prec A\)同时为false的时候,我们可以认为事件A和B同时发生,即是”并发”(concurrency)的,可以简单记为\(A == B\)。我们能否直接以这个timestamp来对事件作排序呢?
答案显然是不行的,因为有并发事件。我们无法判断并发的事件,谁发生在谁的前面。在Lamport的算法中,这个问题可以通过引入node-id,即进程的标识来实现:当两个事件的时间戳一致的时候,则通过比较node-id的大小,来对这些事件进行排序。至此我们就可以给出一个序,它是满足causality的,并且能够被大多数人理解。对分布式系统中的事件进行”排序”,以满足Causality性质的过程,被称为Total ordering。
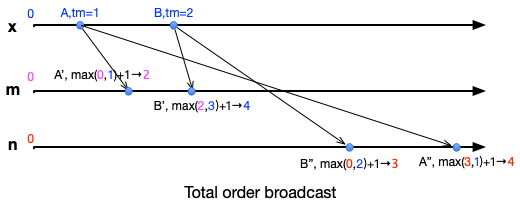
但至此是否解决了开头所提出的时序的问题了呢?其实没有。比如在现实的系统中,我们需要所有的进程,对系统中发生的事件的顺序达成一致。比如某个对象的状态变化,如果所有的进程,对于这个object起始状态,以及对这个object的操作顺序达成了一致,那么我们很自然的就能确保这个object的当前状态在所有进程的理解中是一致的1。在这个场景中,一个发生了的事件需要被广播(broadcast)出去、被系统中的其他进程“观察”到,且观察者对于观察到的事件的顺序要彼此达成一致(Total order broadcast)。这个场景是无法简单的用Lamport timestamp的方法解决的。比如下图中:进程x先后发生了两个事件,即\(A \prec B\)。这个过程需要被进程m和n观察到,即有消息被广播发送给m和n进程。但由于网络通讯的原因,A事件被延后了很久才被n观察到。此时,在m、n两个观察者的眼里,A、B事件发生的顺序就是相反的。
换句话说,Total order虽然给出了事件的一个”有意义的序”,但这个序是假定有个上帝视角的进程,收集到所有信息后所给出的;但在现实的多进程系统中,Lamport timestamp还是没办法让所有的”观察者”观察到的顺序保持一致。大家所熟知的一些分布式算法,比如zookeeper内的zab、近几年开始流行的raft,还有让人十分费解的经典的paxos协议,都是为了一定程度的解决这个问题,后面有机会会展开介绍。
-
即Replicated State Machine(RSM,复制状态机)场景 ↩
About Me